LX-200 の自動導入化への改造
ミードのLX-200 20cmの基板が故障したのをきっかけに、自動導入ができる改造を行いました。
LX-200はたいへん良くできた望遠鏡です、25cmを10年、20cmを4年使用してきました、大きな故障等が無ければ今回のような改造は必要なかったのですが、LX-200-20cmの基板の故障がひどく修理費用が今回の改造費を上回っていました。
この機種もすでに生産終了となり故障時の部品供給の不安などから、もう一台所有の25cmへの改造の手始めに20cmを分解、改造してみました、ここ数年で2台で4回も基板交換の故障がありました。
この改造は私の手持ちの材料と工具で行なったものですので、参考になれば良いのですが、改造される時は、自己責任で行なって下さい、アドバイスはいたします。
LX-200シリーズは20cm〜35cmまでは、ほぼ同一の部品が使用されているので今回の改造と同じようにできそうですが、鏡筒の重量等によりステッピングモーターのパワーを考えるべきでしょう。
K-ASTECさんのE-ZEUSを搭載しているAGS-1Lと
瀬戸口さん製作の自動導入機能があるソフトのYocを使用してLX-200を改造復活させました。
本体とコントローラーが一体のAGS-1Lです。 DC12Vにて駆動し低速、中速、高速の3つの速度調整可能です。
RS232Cを介してパソコンと接続します、最新の機種はUSBでの接続になっているようです。
内部に恒星時駆動速度の設定スイッチが有りモーターやギヤ数などに対応して変更できます。
赤経、赤緯の自動導入時の最高速度も内部で調整できます。
私は、使用することが有りませんが、オートガイド接続端子もあります。
メイン基板を取り外した、赤経(極軸)側を裏面から見たところです、ウオームホイールがのぞいています。
ウオームギヤは取り外してあり、モーターが納まるスペースがじゅうぶんに有ることが判ります。
ウオームホイールは赤経、赤緯ともに180歯です。
高橋のEM-200などと同等の歯数になります。
このシステムで恒星時駆動が100ppsです。
ウオームギヤを取り除いた状態の赤緯(フォーク)側です。モーターのスペースが狭く、カバーを大きくしなければ収まりません。
この状態時にウオームホイールとギヤのグリスの洗浄を
しておきます。
このLX200は知り合いから譲ってもらい4年程使用しましたが、良いグリスを使用しているのかたいした劣化やゴミの混入など無く、清掃しなくてもよかったです。
ウオームギヤユニットにステッピングモーターを平ギヤを介して取り付けたところです。
ステッピングモーターは1/250のギヤー比があり、平ギヤーは35歯でギヤー比は1対1です、ギヤー比をもう少し大きくしたかったのですが取り付けスペースの問題でこのようになりました。
モーター軸は6mmですが、ウオームギヤ軸は6.1mmと異なりますので平ギヤの軸受け穴を大きく加工します。
ウオームギヤユニットは製造年によって微妙に違いが有ります、この違いで平ギヤーを軸に直接取り付けられるか
カップリングを必要とするか分かれます。
オリジナルのウオームギヤユニットにモーター取り付け用のアルミ板(70mm×43mm×6mm)を付けた状態。
モーター取り付け用アルミ板は6mm厚のフラットバーを加工
赤経、赤緯で少し形状が異なります。
平ギヤーの噛み合わせ調整の為モーター取り付け穴は長円になっています。
本体との取り付け部分は10mmのアルミ板に交換しています、従来はバネの圧力でウオームギヤをウオームホイールに押し当てるようになっていましたが、今回の改造で従来のモーターより重いステッピングモーターを取り付ける為、バネの圧力では対処できませんので、本体取り付け部分からウオームギヤユニットを2本の押し引きネジで調節できるようにしました。
赤緯(フォーク)側にモーターを取り付けた状態。
2相のPM型ステッピングモータ(三龍社P43EAG22-250)が付属していましたが、20cmや25cmのLX200では問題なく動作できますが、30cm以上でしたらパワーの有るオリエンタルモーターのPK243等が同等の大きさなので変更したほうが良いかもしれません。
従来の騒音に近いDCモーターとギヤーBOXの音からステッピングモーター特有のクウィーンと唸る公共天文台の大型望遠鏡の音に変わり、この音だけでも改造の甲斐があります。
上の赤緯(フォーク)側にモーターカバーを仮止めした状態。
クランプはそのままで、モーター部分が20mmほど突出しています。
カバーは上面を切り取りプラスチックの箱を作り、黒色の粘着テープで固定しています、カバー全体は元のネジで固定できます。
PPテープの見栄えが悪いのですが夜露対策として、今までも継ぎ目部分に貼り付けています。
とくにフロントパネル回りは要注意です。
夜露や急な雨がケーブルを伝って接続部に入ります。
追尾スピードは問題ないのですが、私の観測スタイルでは1つの星を連続で数時間追いかけます、この為低空から天頂超えで追尾させますが、オートガイドは使用しない為に画像からはみださないように、大気差等を考慮して
恒星時駆動スピードを少し遅く設定しています。
極軸を正確に合わせる事が前提ですが、撮像の最初は少し進みますが後半からは遅れるような感じで狭い画各に収まるように撮像位置を決めます。
約4〜5時間は問題なくお手軽撮像ができます。
鏡筒のバランスはCCDカメラが重い為に筒先に鏡筒バンドを加工して鉛を取り付けています。
CCDカメラの前にフィルターBOXが付いていますが、フィルターホイールを取り付けるともう少し接眼部は短くなりバランスよくなる予定です。
本体(コントローラー)は最初に1星を導入する時のみ使用するだけですので、後は夜露が付かないよう袋に入れて置き、室内のパソコンからYocを使って制御します。
赤緯(フォーク)側のモーターが今までよりも重い為に
バランスウエイトを反対側に仮止めしています。
上部の赤緯軸(耳軸?)に取り付けようと考えています。
全体のバランスをとり、各ギヤーのかみ合わせが問題なければ、モーターは一定の音で回転し脱調もなく順調に作動してくれます。
最高速度からゆっくりと減速していく様子はK-ASTECさんの見せ所でしょう、さすがです。
赤経軸、赤緯軸の直角度を調整して終了。
スムーズにフォーク側(耳軸)の鏡筒の回転が得られれば直角は出ていました。
このシステムでCCDの画各は21’×31’ですが自動導入の精度は問題なく画像のどこかに導入できています。
導入スピードは高速は必要ないので約200倍速ぐらいで設定しました。
LX-200はPPEC(ピリオディックモーション補正)機能がありました、これを起動していなければピリオディックモーションが大きくて撮像に影響がでました。
今回の改造でPPECが無くても使用に耐える追尾ができています、DCモーターギヤか、ウオームギヤユニットの取り付け方法などがピリオディックモーションに影響していたのかと思われます。
この方法が高速での自動導入には必要なんでしょう。
以上で観測に問題なく使用できるようになりました。
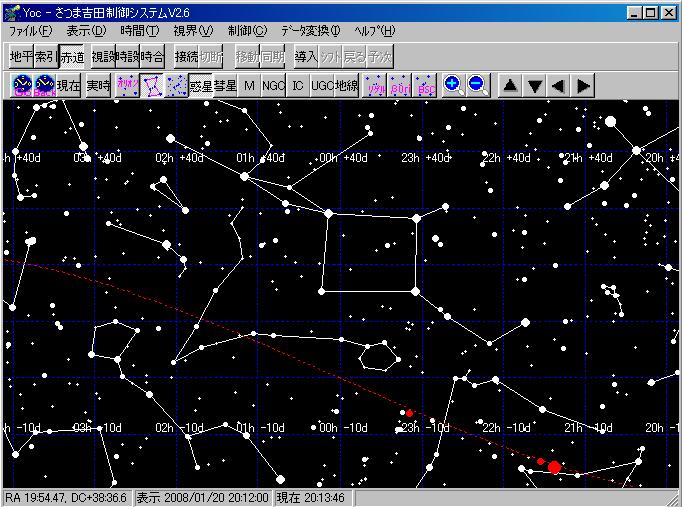
制御ソフトのYocの立ち上げ画面です。
鹿児島県の瀬戸口貴司さんがパソコンから赤道儀を制御して天体の自動導入を行うことにより観測の効率化を図る目的で開発されたソフトですので、使いかっての良いすばらしいソフトです。
フリーソフトであることもありがたいことです。
瀬戸口さんは、東亜天文学会の星食課の幹事で、小惑星による恒星の掩蔽予報をなされています。
瀬戸口さんのHPから、
Yocはダウンロードできます。
このソフトは多くの機能が付いたプラネタリウムのようなソフトで無く、星図と制御に絞り込まれた軽いソフトですので、私は Windows98とPentium120 のノートパソコンで稼動しています(動きは遅いですが)、Pentium500ではサクサクと動作しています。
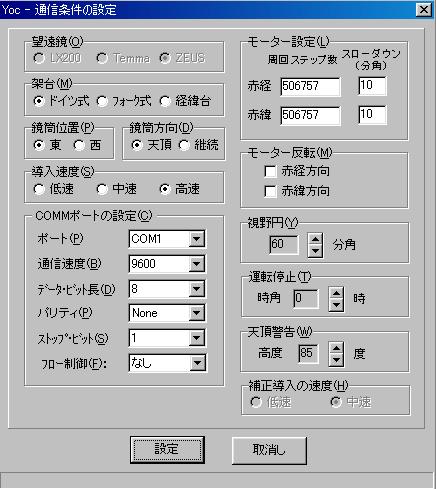
パソコンと赤道儀との接続の設定
画面です。
ソフト側からストップボタンが有り、誤操作にも対応できます。
ハード側のAGS-1Lからも緊急停止スイッチと緊急停止用の端子が有りますので誤操作や居眠りなどにも対処されています。
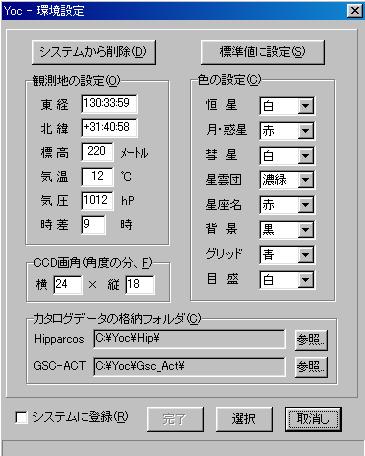
システム設定の画面です。
Yocが使用している星表カタログをここで設定するのですが、HipparcasとGSC-ACTはHPに掲載されている所からダウンロードします。
Hipparcasは問題ないのですが、GSC-ACTをYocフォルダーへ展開するのですが、(binディレクトリ及びN0000〜S8230のディレクトリのすべてのファイル) binディレクトリの内容をYocプログラム本体と同じフォルダーに展開する(広げる?)。
この事がわからず、2ヶ月も悩みました。
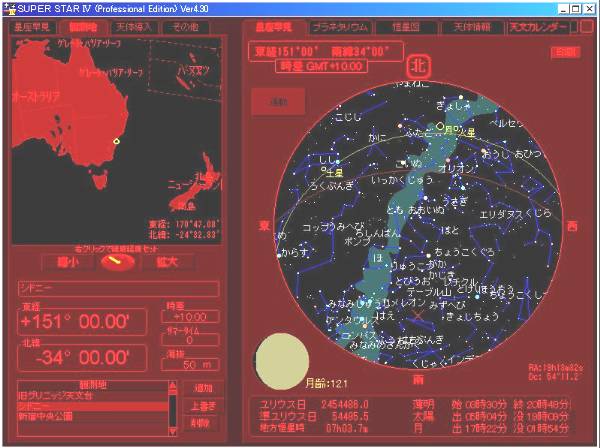
SUPER STAR IV の星図と自動導入の画面です。
たいへんわかりやすく、使いやすいです、使用する目的よってはすばらしいソフトです。
私の観測スタイルではここまでの機能は必要ありません。
星座早見と観測地情報の画面。